
DC Motor Control & PWM Analog
 00.07
00.07
 cah bagoes
, Posted in
control motor
,
driver robot manual
,
Elektronika
,
Joystick
,
PWM
,
0 Comments
cah bagoes
, Posted in
control motor
,
driver robot manual
,
Elektronika
,
Joystick
,
PWM
,
0 Comments
Dua Masalah Umum
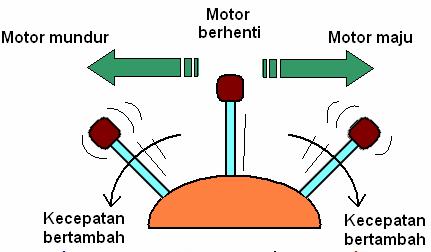
- Mengontrol arah putar
- Mengontrol kecepatan putar
Menggunakan saklar

H-Bridge
Transistor daya menggantikan fungsi saklar manual. Transistor disusun disekitar motor DC, sehingga pada skematik membentuk huruf-H. Hindari (A dan B) atau (D dan C) menyala bersamaan.

Respon transistor sangat cepat (orde mikro
Dapat mengatur daya motor dengan PWM
BREAK: mengaktifkan (B dan C).
PWM
PWM pada dasarnya adalah menyalakan
Duty Cycle

Membuat PWM (analog)

Mengatur Arah Putar

Contoh : KRI 2006 – DEPTH4 PENS
Robot manual menggunakan “Joystick”
Prinsip Kerja “Joystick”
Posisi diubah menjadi

Rangkaian Joystick

You can leave a response, or trackback from your own site.




0 Response to "DC Motor Control & PWM Analog"
Posting Komentar